Document de référence U3P 1988
25 septembre 2019Durant des années 80, plusieurs projets ont été organisés en vue d’une course de voiliers solaires entre la Terre et la Lune, avec un voilier américain, un projet japonais et un projet européen piloté par l’U3P et l’association VSE « Voilier Solaire Européen ».
Les bases du projet U3P ont été rassemblées dans un document de référence rédigé en 1988 :
Voilier Solaire U3P – Version de Référence 1988
0 – INTRODUCTION
La première version de ce document a été publiée en 1983. Elle était le fruit d’un travail de réflexion, de compilation et de préparation et représentait alors la somme technique de l’avancement des recherches de l’U3P pour la construction d’un voilier solaire.
Depuis, de nombreux points se sont précisés. Une solution technique élégante a été trouvée pour le déploiement de la voile, des liens ont été établis avec l’ESIEA pour la poursuite des études et la réalisation du voilier, et avec la société DUNE pour la recherche et la gestion du financement.
Ce document technique est la référence de base pour la poursuite de nos travaux.
Anne-Marie MAINGUY
Présidente de l’U3P
Château de Lespinet, le 31 janvier 1988
I – LA MISSION
1.1 – Préambule: la propulsion photonique
Lorsqu’un satellite est placé en orbite autour de la Terre ou autour du Soleil de manière à atteindre une planète, il doit en général réaliser un certain nombre de manœuvres pour conserver son orbite de travail, ou modifier sa trajectoire. Ces manœuvres sont réalisées par des moteurs qui consomment une matière (gaz, liquide) qu’il a fallu mettre en orbite avec le satellite.
Le seul moyen connu à ce jour de ne pas consommer de matière est d’utiliser la lumière du Soleil grâce à une technique appelée « propulsion photonique ». La lumière du Soleil, comme toute radiation, exerce une pression sur les surfaces qu’elle rencontre. Sur une surface plane parfaitement réfléchissante, cette pression est d’environ 10 newtons par kilomètre carré, et la force résultante est perpendiculaire à la surface éclairée.
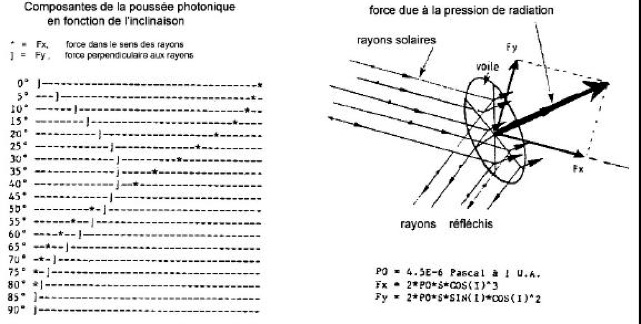
Le photon transfère une quantité de mouvement
Aucun des véhicules envoyés dans l’espace par l’homme n’a, jusqu’à présent, tiré systématiquement parti de cette énergie disponible dans l’espace pour augmenter son domaine d’action.
1.2 – Objectifs de la mission
Le principal objectif du programme « voile solaire » de l’U3P est d’utiliser la propulsion photonique de manière probante et spectaculaire, en se donnant un objectif précis.
Nous avons choisi de partir avec un voilier solaire depuis une orbite terrestre géosynchrone, et de naviguer pour modifier la trajectoire du voilier, jusqu’à passer derrière la Lune.
L’objectif secondaire est d’obtenir des images du voilier, de la Terre, et de la Lune, pour intéresser ainsi plusieurs milliards de personnes, et rapprocher le grand public mondial du cercle restreint des professionnels de l’Espace.
1.3 – Cadre de la Mission
1.3.1 – Conditions de lancement
Le voilier solaire doit être conçu pour être embarqué sous une forme compacte par un lanceur
Ariane-4. Il est prévu pour être lancé sur une orbite de transfert géostationnaire 200 – 36000 km en tant que passager secondaire. Comme éventuellement il peut être porteur d’un autre satellite, il doit pouvoir se comporter comme un adaptateur.
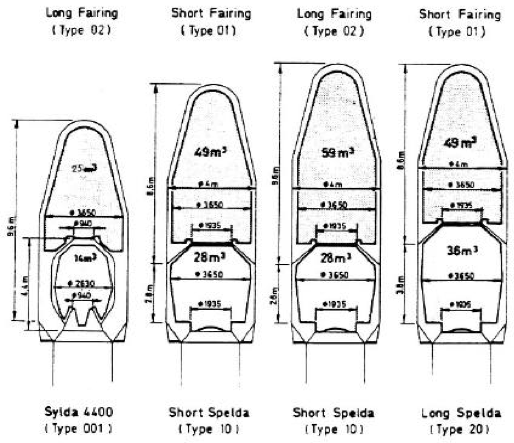
Schéma des configurations de lancement Ariane-4
1.3.2 – Mise à poste du voilier solaire
Le voilier doit comporter un moteur d’apogée et un système de contrôle, qui lui permettent de passer d’une orbite de transfert géostationnaire à une orbite géosynchrone sensiblement circulaire, dans un plan proche de celui de l’écliptique.
1.3.3 – Mise en configuration de la voile
Le voilier doit passer de sa configuration compactée à la configuration de croisière. Il faut noter que le déploiement est une opération délicate. La fiabilité doit donc être très grande.
Les opérations de mise en configuration de la voile doivent pouvoir être suivies en direct.
Le déploiement‚ tant par nature irréversible, une partie ou la totalité du système participant à la mise en configuration de la voile peut être éjectée, à condition de ne pas présenter de risque pour le véhicule ou pour les autres satellites en orbite.
1.3.4 – Configuration nominale du voilier
Les performances du véhicule sont directement liées à la surface utile disponible par unité de masse et à la capacité de manœuvre du véhicule.
Suite aux études entreprises dans la phase de faisabilité, la configuration adoptée est celle d’une voile carrée, tendue par des mâts, et stabilisée trois axes, capable, pour les besoins de la navigation, de modifier lentement (de l’ordre de quelques degrés par minute) son orientation dans un repère absolu.
1.3.5 – Détermination d’attitude et de position
Pour la réalisation de chaque manœuvre il est nécessaire de connaître la position et l’attitude du voilier. La position est acquise par des moyens de poursuite sol, optiques et/ou radioélectriques.
L’attitude est déterminée par des mesures effectuées à bord du véhicule lui-même au moyen de senseurs solaires et stellaires permettant de restituer deux directions inertielles.
La position du voilier solaire est indiquée dans un repère géocentrique absolu J-2000.
L’attitude du voilier est exprimée dans un repère hélio-local centré sur le voilier, l’axe Z ‚tant parallèle à la projection de la direction voile-soleil sur le plan de l’écliptique, et l’axe Y ‚tant parallèle à l’axe des pôles écliptiques.
1.3.6 – Pilotage
La fonction du pilotage est de contenir la trajectoire de la voile à l’intérieur d’un domaine permettant à partir des conditions initiales de passer derrière la Lune. D’autre part, il est nécessaire dans certaines phases de permettre une orientation particulière de la voile pour l’utilisation des antennes, des caméras, et pour des prises d’images de la face cachée de la Lune.
Les caractéristiques et le comportement de la voile doivent être testés au cours de la mission.
Il est donc nécessaire :
– d’identifier les paramètres significatifs permettant de modéliser le comportement de la voile et de simuler au sol l’effet des actuateurs,
– d’adapter les consignes de pilotage aux événements extérieurs et de vérifier l’effet des ordres émis,
– de pallier les incidents pouvant survenir au cours de la mission, donc de disposer au sol du minimum d’informations permettant d’évaluer les problèmes et d’avoir à bord les moyens d’appliquer des procédures de secours.
Le pilotage doit pouvoir être préprogrammé pour permettre à la voile d’évoluer de manière autonome pendant des périodes de plusieurs jours. La programmation automatique doit pouvoir être interrompue à volonté pour permettre un pilotage par commande directe depuis le sol.
1.3.7 – Actuation
Une orientation intelligente du vecteur poussée est nécessaire. Dans le cadre du projet, il est admis de n’utiliser comme principe d’actuation que des systèmes n’impliquant pas de consommation de matière. Une évolution de l’attitude dans le sens désiré est obtenue par la manœuvre de 8 gouvernes périphériques triangulaires.
La navigation par effet photonique est une nouveauté. Un programme d’identification de paramètres de manœuvrabilité doit être réalisé en début de phase opérationnelle.
1.3.8 – Télémesure / Télécommande
Le système de télémesure et télécommande doit satisfaire aux règlements internationaux en particulier en ce qui concerne les attributions de fréquences (CCIR). Le système de liaison doit pouvoir permettre des communications efficaces pour des distances allant de 10.000 à 500.000 km.
1.3.9 – Charge utile expérimentale
La voile de l’U3P peut emporter à son bord une charge utile expérimentale réalisée sous responsabilité de la SAP (Société d’Astronomie Populaire), dont la mission est de prendre des images de la face cachée de la Lune.
Il est envisageable d’embarquer d’autres expériences à bord du voilier si les conditions de masse et de besoins en énergie sont compatibles avec les objectifs de la mission.
1.3.10 – Conditions de réalisation du véhicule
Dans toute la mesure du possible, la réalisation ne doit faire appel qu’à des techniques classiques et prouvées.
De manière à assurer une fiabilité et une durée de vie (90% de chances que le véhicule fonctionne plus de deux ans) satisfaisantes, l’ensemble des tests finaux et les essais de compatibilité avec le lanceur se font dans le cadre professionnel habituel.
1.4 – Description de la mission
1.4.1 – Concept Général
Cette partie concerne les trajectoires et les manœuvres d’orientation de la voile envisagées pour atteindre les buts de la mission.
Le but principal de la mission est d’arriver au plus vite derrière la Lune. Le but secondaire consiste à obtenir des images de la Terre, de la Lune, et du voilier.
Le véhicule est une voile solaire carrée, dont l’attitude est contrôlée suivant trois axes.
Le lancement est assuré par Ariane, en commun avec d’autres satellites, sur une orbite de transfert géostationnaire. Sa séparation avec le 3ème étage d’Ariane a lieu quelques instants après l’arrêt des moteurs. Après quelques révolutions sur l’orbite de transfert, le moteur solide est mis à feu à l’apogée, pour injecter le satellite sur une orbite d’altitude géosynchrone dans le plan de l’écliptique. Le déploiement de la voile s’effectue sur cette orbite qui est l’orbite initiale de la trajectoire pilotée.
Pendant une année environ, une phase de navigation amène l’apogée de l’orbite à l’altitude de la Lune et assure les conditions du survol. La mission de la voile après le survol peut être définie ultérieurement.
Durant la phase de mise sur orbite de déploiement, les servitudes sont assurées par un module comprenant la structure porteuse, un moteur solide, un contrôle d’attitude et un système de liaison sol. Le module de servitude est séparé du voilier au moment du déploiement. Le voilier est passif durant cette phase.
Durant la phase de croisière, des manœuvres d’attitude de la voile sont nécessaires pour modifier les paramètres d’orbite au moyen de la poussée photonique, assurer des communications avec les stations sol, et orienter les caméras embarquées vers des objets d’intérêt. Durant cette phase, aucun moyen de propulsion autre que la pression solaire n’est admissible.
Durant le survol de la Lune, la trajectoire de la voile et son orientation doivent permettre le fonctionnement de la caméra embarquée. Les données sont transmises à la Terre en temps différé au cours de l’orbite suivante.
1.4.2 – Phases de la mission
La mission est divisée en cinq phases :
(1) le lancement. Ceci inclut toutes les opérations requises par le lanceur, et s’arrête à la séparation du 3ème étage. La vitesse de rotation est la vitesse maximum délivrée par Ariane-4, l’orientation est fixée en fonction de l’heure de lancement.
(2) la mise à poste. Elle couvre la période comprise entre la séparation d’Ariane et la fin du déploiement.
(3) la phase de croisière. Cette phase dure environ une année, durant laquelle le véhicule se déplace sur une trajectoire géocentrique d’apogée croissante. Après une période de tests et d’évaluation en vol, des opérations de routine assurent la trajectographie et le recalage de la loi de pilotage. Quelques opérations exceptionnelles peuvent avoir lieu.
(4) la phase de survol. Elle commence quelques jours avant le passage au plus près de la Lune. La voile et le réseau sol sont préparés pour assurer une navigation précise et un bon fonctionnement de la caméra. Elle se termine après la transmission de la photographie de la face cachée de la Lune.
(5) l’après-survol. Cette phase peut être définie ultérieurement.
Durant les phases (2) à (4), les principales activités opérationnelles sont liées :
- au contrôle de l’état du satellite et à sa gestion
- à la détermination de la trajectoire
- à l’établissement de la loi de pilotage
- à la transmission des ordres de navigation
- à l’utilisation des caméras
- à la préparation du survol
1.4.3 – Orientation de la manœuvre d’apogée
Le meilleur rendement de la manœuvre d’élévation du périgée est obtenu pour un delta-V effectué à l’apogée et perpendiculaire au rayon vecteur. Toutefois l’orientation du delta V doit tenir compte des contraintes d’orientation relatives à la phase de déploiement de la voile afin d’éviter une manœuvre de changement d’attitude préalable.
Ces contraintes sont essentiellement :
– orientation par rapport au Soleil. Le Soleil doit se trouver dans le demi-espace défini par les panneaux solaires,
– possibilité de TM/TC avec la station sol.
1.4.4 – L’orbite de déploiement et de test
La phase de déploiement et de test préliminaire dure plusieurs heures.
Pendant cette phase, les liaisons TM/TC sont requises en permanence avec le sol.
1.4.5 – Pilotage
Le pilotage de la voile, c’est-à-dire le contrôle de son orientation, a pour but :
– de permettre la navigation en orientant le vecteur poussée,
– d’orienter un lobe d’antenne vers une station TM/TC sol,
– d’orienter le voilier pour permettre le fonctionnement d’une caméra dans une direction choisie.
Il doit pouvoir s’effectuer en direct depuis le centre de contrôle au sol ou être préprogrammé pour un fonctionnement autonome.
1.4.6 – Procédure de sauvegarde
Pour le cas où les paramètres d’attitude du voilier sortiraient des normes préétablies, une procédure automatique de reconfiguration doit être prévue.
II.a – LE SYSTEME : Analyse des Besoins
2.1 – Rapport S/M
L’étude préliminaire, réalisée en 1981 par des étudiants de l’ENSAE (Mariaud – Bobo) a montré qu’il est nécessaire de disposer d’un rapport S/M égal ou supérieur à 15 m2/kg pour faire le trajet orbite géostationnaire – orbite Lune en une année.
Compte tenu des contraintes d’Ariane-4, et du statut de passager secondaire, le point de dimensionnement retenu correspond… une masse de 200 kg au départ et à une surface de 2000 m2.
2.2 – Pilotage
La fonction du pilotage est de communiquer à un trièdre voile une orientation donnée dans un repère inertiel de manière à utiliser efficacement les composantes de la force de propulsion qui résulte de la pression solaire.
2.2.1 – Domaine de manœuvrabilité
Les études d’évolution de l’angle normale à la voile – direction voile-Soleil montrent que le Soleil peut rester à l’intérieur d’un cône de demi-angle au sommet 70 degrés et d’axe normal à la voile sans restreindre de manière significative les performances du pilotage. Le domaine de manœuvrabilité à l’intérieur duquel les couples de manœuvre doivent permettre les accélérations angulaires voulues est donc dans ce cône.
Si, pour une raison quelconque, la normale à la voile vient à sortir du cône de pilotage, le système de pilotage doit à lui seul, automatiquement, ramener la normale à la voile à l’intérieur du cône.
2.2.2 – Actuation
L’actuation communique des accélérations angulaires par l’action de gouvernes placées à la périphérie de la voile. Les accélérations angulaires requises sont de 10E-6 rad/s² en lacet et en tangage, de 10E-7 rad/s² en roulis.
2.2.3 – Précision du pilotage
La précision de l’orientation de la voile par rapport à l’orientation désirée découle :
– de la connaissance de modèle du véhicule lui-même,
– des précisions du système détecteur et du système actuateur.
Les contraintes proviennent :
– du respect de la loi de pilotage de référence,
– de la qualité des liaisons radio,
– des missions d’imagerie.
Les contraintes prises en compte font que dans tous les cas on aboutit à une spécification de précision de l’ordre de quelques degrés.
2.2.4 – Senseurs
La contrainte de précision de pilotage se retrouve intégralement dans le choix du système de détection d’attitude. Une restitution d’attitude ne peut être complète que si l’on dispose de deux directions inertielles.
L’une est relativement simple à obtenir : c’est la direction véhicule-Soleil, qui de plus permet d’évaluer directement la force de propulsion. Elle est déterminée par des senseurs solaires.
Pour l’autre direction, la solution retenue consiste à restituer dans un repère véhicule la direction d’une ou plusieurs sources connues.
Le moyen choisi est donc d’utiliser des matrices CCD placées derrière des optiques à grand champ de vue. Chaque pixel correspondra à moins de 1 degré carré. Les matrices CCD‚ tant sensibles aux radiations, il sera nécessaire de les entourer d’un blindage. Les éléments visibles par ces matrices CCD seront la Terre, la Lune, et les étoiles les plus brillantes. La connaissance des directions de visée de sources bien connues permettra alors de restituer complètement l’attitude de la voile.
2.2.5 – Principe du pilotage
Le pilotage consiste à communiquer à la voile des vitesses angulaires telles que sa normale décrive une courbe donnée sur la sphère céleste. La précision avec laquelle la loi théorique doit être suivie est de l’ordre du degré.
Deux possibilités de pilotage, non exclusives, doivent être étudiées :
– un pilotage « manuel » dans lequel le sol est constamment actif,
– un pilotage automatique préprogrammé.
Le mode de pilotage manuel est indispensable au début de la mission, en raison des imprécisions des modèles.
L’objectif est cependant de permettre un asservissement automatique de la voile à une loi de commande donnée, la part du sol dans le pilotage se bornant à déterminer des trajectoires de l’extrémité de la normale, à communiquer cette loi au véhicule, et à en surveiller l’application.
2.3 – Liaisons
2.3.1 – Fonctions
Le système de liaisons doit permettre d’échanger des informations entre le bord et le sol de manière à :
– permettre le pilotage de la voile et contribuer à sa localisation,
– réaliser les expériences embarquées à bord de la voile et en recueillir les informations,
– transmettre au sol certaines informations de contrôle de fonctionnement.
On peut classer les informations en trois rubriques :
1) télémesure :
- accuser réception des télécommandes,
- transmettre les informations technologiques (températures, état de fonctionnement des équipements),
- transmettre des informations d’attitude traitées (direction du Soleil et autres sources lumineuses) ou brutes (imagerie CCD),
- transmettre les informations de la charge utile expérimentale (caméra CCD pour photographier la face cachée de la Lune).
2) télécommande:
- transmettre à la voile des ordres de mise en marche ou d’arrêt d’équipements (commandes ON/OFF),
- transmettre des paramètres de fonctionnement (positionnement d’un actuateur),
- procéder au téléchargement du programme permettant la réalisation en mode,
- automatique d’un certain nombre d’actions, en particulier le pilotage.
3) localisation:
- déterminer la distance entre une station terrestre et le véhicule par mesure d’un temps de propagation,
- en option : déterminer la vitesse relative station-voile par mesure de l’effet doppler,
- déterminer la direction instantanée station-voile par des relevés angulaires de la direction de l’antenne terrestre.
2.3.2 – Choix des fréquences
Les liaisons radio sont d’une importance majeure pour le succès de la mission. Le choix est donc fait de rechercher des accords de participation avec des réseaux terrestres classiques garantissant la disponibilité et les performances requises.
La bande utilisée est la bande S (à 2 GHz), seule bande de fréquence commune aux réseaux occidentaux (CNES, ESA, NASA), et également utilisée par le réseau chinois.
Tous les matériels nécessaires à la mission existent sur catalogue dans cette bande. D’autre part, les radioamateurs disposent d’une bande qui en est très proche, et ils peuvent participer à la réception des télémesures.
2.3.3 – Permanence des liaisons
1) – Conditions des liaisons
Une liaison ne peut être établie que si :
– le véhicule est en visibilité directe de la station terrestre, la direction station-véhicule ‚tant au minimum à 5 degrés au-dessus de l’horizon,
– l’attitude de la voile est telle qu’une des antennes émettrices (ou réceptrices) de bord voit la station terrestre à l’intérieur d’une certaine zone,
– le bilan de liaison est suffisant.
2) – Visibilité du véhicule depuis une station sol
La contrainte à prendre en compte si la permanence des liaisons est nécessaire est de pouvoir
disposer de cinq stations réparties autour de la Terre.
3) – Visibilité radio d’une station depuis la voile
L’attitude de la voile est principalement contrainte par les manœuvres de pilotage. Le pilotage est cependant indifférent (en mode nominal, c’est-à-dire si aucun actionneur n’est en panne) à la phase de l’angle de roulis. Ce degré de liberté peut être utilisé pour privilégier une direction et l’astreindre à rester dans le plan de l’écliptique. Ceci ne peut cependant être réalisé qu’après la phase d’apprentissage et de modélisation de la voile.
Les contraintes à prendre en compte sont :
– possibilités de quasi-omnidirectionnalité en réception de télécommande jusqu’à l’altitude de la Lune. Les télécommandes représentent des débits binaires de quelques dizaines de bits par
seconde. Elles ne doivent pas présenter de taux d’erreur de bit supérieur à 10E-5, sans utilisation de code convolutionnel.
– quasi-omnidirectionnalité en émission jusqu’à une altitude d’environ 60.000 km.
– au-dessus de cette altitude, on peut considérer que la maîtrise de la voile donne en permanence la possibilité de diriger vers la Terre une antenne peu directive (dizaine de degrés).
– les débits de télémesure doivent être de quelques centaines de bits par seconde. L’utilisation d’un codage convolutionnel type Viterbi et Reed-Solomon est acceptable de manière à réduire le rapport signal/bruit si nécessaire.
– en ce qui concerne la localisation, l’emploi de la bande S incite à utiliser un système classique de transpondeur cohérent. Une étude détaillée faisant appel à des simulations numériques doit être entreprise pour évaluer les performances du système de localisation et ses ressources nécessaires en moyens sol.
2.4 – Planéité
2.4.1 – Visibilité Optique
La voile doit être suffisamment plane pour être visible depuis la Terre (localisation par les astronomes amateurs, et impact sur les médias), et rester pilotable (absence de couple de rappel permanent).
Des études de visibilité optique ont été menées dans le cadre d’un stage ENSAE au CERT/DERO et par des membres de la SAP. Les conclusions principales sont que si la voile
présente une courbure globale de 400 m environ et une dispersion aléatoire de quelques degrés pour la normale en un point par rapport à la normale théorique, la voile pourra être vue depuis la Terre comme une étoile de magnitude < 6 jusqu’à l’altitude de la Lune. (Etude de 1ère année ENSAE juin 82, M. HARTER), donc visible à l’œil nu par un observateur expérimenté.
2.4.2 – Pilotage
Des défauts de planéité entraînent la présence de couples permanents qui viennent perturber les couples de manœuvres. La forme théorique optimale doit être respectée avec une précision suffisante pour que ces couples permanents restent négligeables devant les couples de manœuvre, soit moins de 10 cm d’écart pour les déformations permanentes.
2.5 – Besoins en éclipse
Pendant les périodes d’éclipse, le véhicule ne dispose plus de moyens de manœuvrer ni d’entretenir son bilan énergétique. Le nombre et la durée des éclipses rencontrées dépendent de la trajectoire suivie. Le temps maximal passé en éclipse varie de 70 minutes à l’altitude géosynchrone à 7 heures pour une orbite lunaire.
Des études doivent être faites pour déterminer plus précisément la répartition du temps d’éclipse en fonction de la date de tir et de la stratégie de pilotage choisie.
Le passage en éclipse, à travers la disparition de l’efficacité du système d’actuation, rend la voile incontrôlable. Une source d’énergie de substitution (batteries) doit être disponible, pour conserver les fonctions essentielles :
– détection d’attitude,
– liaisons, TM/TC, et localisation,
– contrôle thermique actif éventuel,
– gestion bord.
Les problèmes thermiques sont cruciaux car la température atteinte peut, au pire, être de 4 deg.K (-269°C) entraînant :
– une déformation de la structure qui aura de plus à supporter le choc thermique lorsque le véhicule sortira d’éclipse,
– une détérioration éventuellement définitive de l’électronique embarquée.
Pour ce qui est de l’électronique, on peut envisager de la rassembler à l’intérieur d’enceintes minimisant les pertes thermiques. Le problème de la tenue des mâts, la résistance du matériau constituant la voile, et le comportement des actuateurs des gouvernes, doivent être étudiés avec une attention particulière.
Conserver la possibilité de connaître l’attitude de la voile pendant les éclipses peut être important pour agir rapidement sur le contrôle d’attitude en sortie d’éclipse. Cette option, si elle s’avère nécessaire, entraîne le besoin d’entretenir un minimum d’activité de détection (CCD), de liaisons et de gestion bord.
Le problème de survie aux éclipses et au choc thermique de retour au soleil est vital pour la voile et il doit être étudié dans deux directions :
– recenser et quantifier les contraintes de dimensionnement structural, thermique, et énergétique induites par les éclipses. En déduire des choix technologiques sur l’électronique, les mâts, la voile et les actuateurs. Chiffrer les conséquences en termes de coûts, masse et fiabilité.
– s’imposer d’éviter au maximum la rencontre des éclipses, établir une stratégie de pilotage fonction de la date du lancement.
II.b – LE SYSTEME : Expression des Contraintes
2.6 – Configuration de lancement
Le container à l’intérieur duquel le voilier doit être compacté a un diamètre de 3,6 m et une hauteur maximale de 1 m.
2.7 – Mise en configuration de vol
C’est la première action entreprise sur le véhicule et l’aspect fiabilité de cette opération est primordial. La probabilité de succès de la mise en configuration doit donc être supérieure à 99%.
Les conditions suivantes doivent être remplies pour permettre le déclenchement de la phase de mise en configuration :
– direction véhicule-Soleil proche de l’axe de révolution de la structure porteuse, du côté voulu.
– mise sous tension et contrôle du bon fonctionnement de l’ensemble des sous-systèmes.
– établissement des liaisons véhicule-sol dans les deux sens.
2.8 – Configuration de vol
2.8.1 – Structure
Le véhicule doit être prévu pour être placé au lancement en adaptateur sous un autre satellite dont la masse peut atteindre 1000 kg. La partie centrale de la structure doit être un tube porteur au diamètre d’interface 1194, qui comporte toutes les liaisons d’un adaptateur.
Après la mise en configuration de vol, les masses structurales qui ne sont pas nécessaires à la poursuite de la mission sont éjectées dans des conditions qui doivent éviter tout risque de collision ultérieure avec le voilier lui-même ou avec d’autres systèmes spatiaux.
2.8.2 – Thermique
Le système de contrôle doit assurer une répartition de température propre au bon fonctionnement du véhicule, et ceci :
– pour les phases de vol normal : Soleil à l’intérieur d’un cône de 70 degrés de demi-angle au sommet et d’axe normal à l’une des faces.
– pour les phases anormales : Soleil en dehors de ce cône même pendant des temps très longs (régime continu).
– pendant les éclipses : durée maximale environ 7 heures.
– pour tous les régimes de fonctionnement des sous-systèmes : de l’arrêt total jusqu’à la simultanéité d’utilisation.
Le comportement thermique de la structure porteuse de la voile (mâts) devra en particulier rester conforme aux contraintes de planéité imposées par les besoins de pilotage et de visibilité.
Les températures de fonctionnement de l’électronique sont en général comprises entre -10 et +50°C , les températures de stockage entre -25 et +60°C . Pour les batteries, ces fourchettes sont respectivement (-5 à +20°C) et (-20 à +50°C).
2.8.3 – Télémesure – Télécommande – Localisation
Les liaisons TM/TC doivent pouvoir être établies pratiquement en permanence. Ceci impose de disposer d’un système émetteur-récepteur de part et d’autre du plan de la voile, le diagramme de rayonnement de chacune de ces antennes couvrant un hémisphère. Une antenne directionnelle doit être prévue au cas où le bilan de liaison du système omnidirectionnel s’avèrerait insuffisant.
Les fonctions assurées à bord par le système de télécommunications sont :
-réception des télécommandes,
-envoi des télémesures,
-envoi/réception des signaux spéciaux de localisation (Doppler et/ou détermination de distance) et, selon le cas, traitement de ces signaux.
La fiabilité du système de télécommunications est particulièrement cruciale.
Les liaisons doivent pouvoir être maintenues pendant les éclipses (gestion thermique et suivi de l’évolution de l’attitude).
2.8.4 – Gestion bord
Le système gestion bord a pour tâche de gérer l’ensemble des informations circulant à bord du véhicule.
Les interfaces entre le système gestion bord et le système de télécommunications se situent entre le codeur et l’émetteur d’une part, entre le décodeur et le récepteur d’autre part.
Le système gestion bord comprend :
– Un codeur/décodeur dont le rôle est de formater la télémesure et de dé commuter les télécommandes. Les télémesures proviennent de trois origines :
- des équipements connectés à la fois au codeur/décodeur et au micro-calculateur : actuateurs, expériences,
- des équipements connectés uniquement au codeur/décodeur : dispositifs pyrotechniques, thermiques, systèmes participant à la mise en configuration du véhicule,
- du micro calculateur.
– Un microprocesseur muni de ses circuits périphériques (mémoires ROM et RAM, horloge).
– Un bus de liaison entre les équipements (actuateurs, contrôle thermique,…) et le micro calculateur. Ce bus doit être standard de manière à simplifier les interfaces et faciliter la réalisation de maquettes de fonctionnement.
– Une artère de données spécialisée dans le transfert d’informations entre le micro calculateur et le système imageur CCD.
Le fonctionnement du système de gestion de bord pendant les périodes d’éclipse peut être limité aux seules fonctions nécessaires à la survie du voilier.
2.8.5 – Système de contrôle d’attitude et d’orbite
Ce système comporte :
1) des senseurs.
– sur la face solaire : un senseur solaire ayant un domaine de fonctionnement correspondant au cône de manœuvrabilité de la voile soit 70 degrés de demi-angle au sommet.
– sur la face antisolaire : un ou plusieurs senseurs optiques constitués par :
– une optique
– une matrice CCD
– un système de gestion de la CCD
2) des actuateurs.
L’actuation s’effectue par l’orientation de gouvernes périphériques modifiant la répartition des efforts dus à la pression solaire, donc créant des couples. L’organe moteur de ces actuateurs est constitué de moteurs électriques commandés soit via le codeur/décodeur, soit à partir du micro-calculateur, de manière programmée selon des séquences prédéterminées chronologiquement ou sur occurrence d’événements (direction d’étoile, de la Terre, … ).
3) des algorithmes
Déterminés à priori au sol avant le vol à l’aide de simulations, validés lors des premières semaines de vol par un programme de certification et de modélisation, ils sont communiqués au bord par télécommande au fur et à mesure du déroulement de la mission.
2.8.6 – Energie bord
Le système d’énergie bord doit satisfaire les besoins des différents équipements, qui sont de l’ordre de 100 W. Cette énergie provient exclusivement du rayonnement solaire.
La présence de batteries à bord est nécessaire, compte tenu :
– de périodes de pointe de consommation probables,
– des conditions d’ensoleillement variables, depuis un maximum jusqu’à l’éclipse totale de plusieurs heures pendant lesquelles un minimum d’énergie est nécessaire pour assurer la poursuite de la mission,
– d’erreurs de pilotage non exclues provoquant le retournement de la voile par rapport à la direction solaire.
Le système d’énergie bord comporte donc :
– Un générateur solaire pouvant fournir environ 100 W situé sur la face solaire.
– Une ou plusieurs batteries assurant une fourniture de 50 à 100 Wh en l’absence de rayonnement solaire.
– Un système de régulation et de distribution de l’énergie aux différents équipements.
– Un petit générateur solaire (10 W), situé sur la face antisonore, permettant d’assurer une mission minimum en cas de retournement irréversible de la voile.
III – LE VÉHICULE – Aspect général
3.1 – Architecture Générale
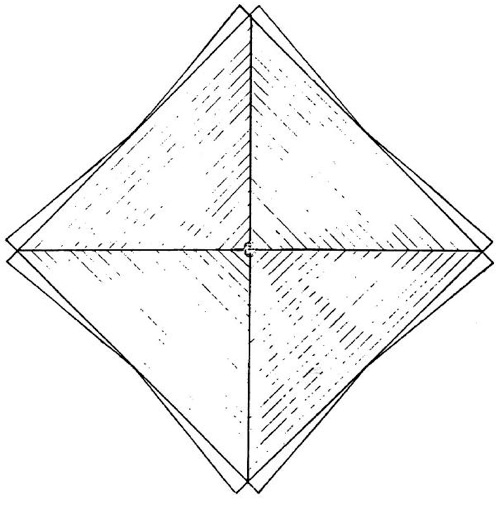
Le véhicule est constitué d’un plateau central, d’un ensemble éjectable, et d’une voile de forme
carrée de l’ordre de 2000 m2 constituée elle-même de deux parties :
-une partie fixe de l’ordre de 1800 m2, structurée en 4 secteurs triangulaires par deux mâts en croix,
-une partie mobile comprenant 8 gouvernes périphériques de 25 m2 chacune.
3.2 – Configuration de Lancement
– Le véhicule est contenu dans un cylindre de diamètre égal à 3,6 m et de hauteur égale à 1 m.
– La répartition des masses est de révolution.
3.3 – Sous-Systèmes
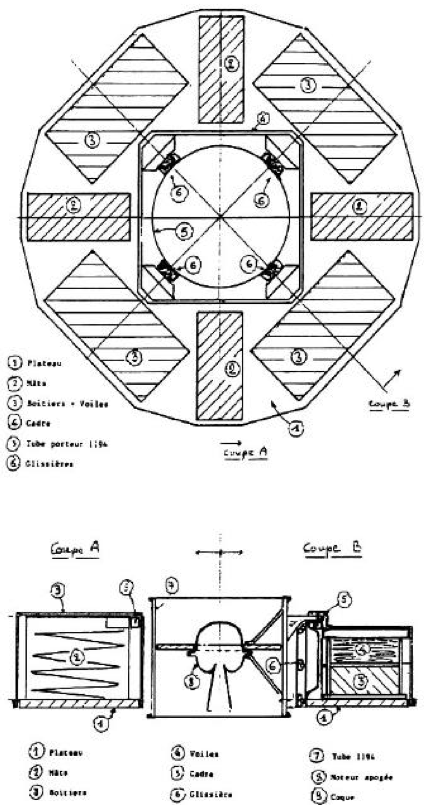
3.3.1 – Plateau Central
Le plateau central est une couronne d’un diamètre extérieur inférieur à 3,6 m, qui porte 4 boîtiers d’équipement électroniques, les mâts structuraux, et les équipements annexes. Il est initialement fixé sur le cylindre porteur.
3.3.2 – Mâts structuraux
Le principe retenu est celui de 4 mâts haubanés par un réseau triangulé de câbles souples, initialement repliés en accordéon sur le plateau central.
Les éléments d’extrémité portent les bras mobiles des gouvernes et leurs actuateurs.
3.3.3 – Voile
Le matériau choisi est le Kapton 8 micromètres aluminisé deux faces et renforcé par un maillage de rubans du même matériau. L’assemblage des panneaux entre eux se fait en bord à bord avec ruban de recouvrement également en Kapton aluminisé. Les deux faces sont reliées électriquement.
– Le choix du Kapton est guidé par les raisons suivantes:
. bonne tenue aux radiations ionisantes (jusque 5.10E+9 rads),
. bonne tenue thermique (250°C en utilisation continue)
– L’adhésif des rubans de renfort et d’assemblage est de type polyuréthane et conducteur. Ce choix est motivé par la souplesse et la bonne tenue aux radiations ainsi que par la nécessité de maintenir la surface en équipotentiel.
La voile est divisée en 4 secteurs conditionnés au départ sur les boîtiers électroniques que porte le plateau central. Elle est fixée aux extrémités de chaque élément alterne des mâts repliés, et elle est recouverte par l’enveloppe externe. Elle se déploie simultanément avec les mâts.
3.3.4 – Partie Éjectable
Elle comprend la structure porteuse, le moteur d’apogée et le système de mise à poste, le système de déploiement du voilier, et l’enveloppe externe.
Dans la phase de mise à poste, la partie éjectable se sépare du plateau central, et extrait simultanément les mâts et la voile suivant l’axe Z du voilier, avec l’assistance de boudins gonflables initialement pliés avec la voile.
Après largage de la partie éjectable, les mâts et la voile s’ouvrent dans le plan du plateau central.
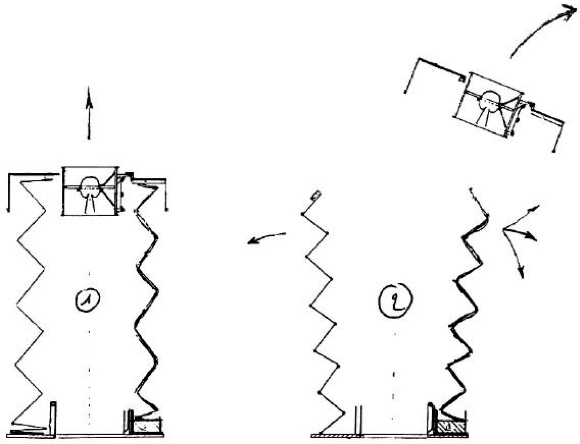
Principe du Déploiement du Voilier
3.3.5 – Bras mobiles des gouvernes
Chaque bras, constitué d’un brin flexible long de 2,5 m, est replié le long du dernier élément du mât principal. Après déploiement de ceux-ci les bras mobiles prennent leur forme définitive. Les bras sont orientés par des actuateurs situés à leur base.
3.3.6 – Contrôle d’attitude
1) Actuation
– Les gouvernes sont des éléments de voile triangulaires qui s’articulent le long des côtés de la partie fixe de la voile, et qui sont mus par des bras motorisés fixés à l’extrémité des mâts structuraux. Les bras se meuvent dans des plans perpendiculaires aux axes d’articulation.
– Les dimensions d’une gouverne sont :
. suivant l’axe d’articulation : 20 m
. suivant le bras de motorisation : 2,5 m
soit une surface unitaire de 25 m2.
– Les gouvernes sont banalisées, et peuvent être utilisées indifféremment selon plusieurs modes possibles pour modifier les paramètres de roulis, tangage et lacet.
2) Détection
Le sous-systèmes de senseurs d’attitude est constitué de :
– trois senseurs solaires
– quatre senseurs optiques (CCD)
Deux des senseurs solaires sont situés sur la face solaire du véhicule, l’un étant en redondance de l’autre, le troisième étant sur la face antisolaire. Le senseur situé sur la face antisolaire n’est utilisé que pour permettre de revenir en attitude nominale, en cas de retournement intempestif du voilier.
Les senseurs optiques (CCD) sont situés sur la face antisolaire du véhicule. La direction de visée de chacun d’eux est inclinée de 45 à 60 degrés par rapport à la direction antisolaire. Le champ de vue de chacun de ces senseurs doit permettre la visibilité de corps lumineux en nombre suffisant pour déterminer l’attitude du voilier.
3.3.7 – Gestion de bord
Le système de gestion bord est constitué d’un codeur-décodeur, et de deux calculateurs, l’un étant en redondance de l’autre.
Les calculateurs sont programmables depuis le sol. Les informations peuvent être stockées dans trois types de mémoire :
– ROM : programmes d’initialisation du système
– RAM : mémoires vives programmables
– RAM statique : mémoires programmables non volatiles permettant de sauvegarder les informations utiles en sortie d’éclipse sans obliger à alimenter le calculateur en permanence.
Le dimensionnement des différentes mémoires doit tenir compte de l’objectif d’automatisation partielle du contrôle d’attitude.
3.3.8 – Télémesure – Télécommande – Localisation
La solution retenue consiste à utiliser la bande S des fréquences à 2 GHz.
Le système comporte :
– deux transpondeurs cohérents,
– deux antennes situées chacune sur une face du corps central et rayonnant dans un demi-espace,
– une antenne plus directive (champ de 10×10 degrés).
Dans chaque cas, la puissance émise est de 10 W.
Le système Télémesure-Télécommande-Localisation doit pouvoir fonctionner en mode économique pendant les périodes d’éclipse solaire.
3.3.9 – Énergie
Le système énergie bord comporte des panneaux solaires, une batterie d’accumulateurs, une électronique de régulation et de distribution, et le câblage.
La face solaire du plateau central est garnie de cellules solaires assurant environ 100 W pour un éclairement normal à la surface et environ 30 W pour une incidence du Soleil de 70 degrés, correspondant à l’écart maximal théorique en fonctionnement nominal.
Un petit panneau solaire est situé sur la face antisolaire. Son rôle est de permettre d’assurer la fourniture d’un minimum d’énergie (10 W) aux équipements en cas de stabilisation du véhicule pendant une longue période dans une direction opposée à la direction nominale.
La batterie est constituée de l’assemblage en série d’une vingtaine d’accumulateurs Ni-Cd délivrant chacun 6 Ah sous 1,2 V.
L’électronique de régulation assure la recharge des batteries, et la distribution régulée de la puissance aux différents équipements.
3.3.10 – Contrôle Thermique
Le contrôle thermique est globalement passif, constitué de super isolant et de revêtements à coefficients thermiques convenables. La plus grande partie de l’électronique dissipative d’énergie doit être située sur la face antisolaire.
Les moteurs situés en bout de mât doivent avoir une plage de fonctionnement s’étendant typiquement de -55 à +125°C et doivent pouvoir se satisfaire de super isolant.
Au cas où le modèle thermique du véhicule et le calcul des temps passés en éclipse en démontreraient la nécessité, il est envisagé d’utiliser un contrôle actif pour empêcher les équipements sensibles d’atteindre des températures trop basses.
IV – LE SEGMENT SOL
4.1 – Le Centre de Contrôle
Un Centre de Contrôle doit être établi, où sont reçues les informations sur la position et l’attitude du voilier, les images des caméras de bord et les données des télémesures, et d’où sont envoyés les ordres de télécommande.
Il peut être nécessaire, lorsque le voilier n’est pas en visibilité directe, de disposer de stations auxiliaires pour relayer les liaisons de TM/TC.
4.2 – Le Réseau de Poursuite
Un réseau de stations de poursuite optique doit être établi, afin de pouvoir déterminer avec précision la position du voilier.
4.3 – Le Centre de Calcul
Un Centre de Calcul doit être institué, où est modélisé le comportement du voilier, où sont traitées les images reçues, où sont élaborées les stratégies de pilotage, et où sont préparés les ordres de télécommande et la programmation du voilier.
Un simulateur doit être réalisé, qui permette de prévoir l’évolution de l’attitude de la voile en réponse aux ordres donnés, et de prévoir l’évolution de la trajectoire en fonction des consignes de pilotage.
4.4 – Le Centre d’Information
La mission doit pouvoir être présentée de manière claire au grand public. Un centre d’information, distinct du Centre de Contrôle, doit être institué à cet effet.
V – LES EXPÉRIENCES
5.1 – La Caméra Lunaire
Il est prévu que la SAP (Société d’Astronomie Populaire) embarque une caméra pour prendre une ou des images de la face cachée de la Lune lors du survol. Ces images sont stockées à bord et retransmises au sol après le passage.
En complément, des images de la Terre, de la Lune, et du voilier lui-même peuvent être fournies par les capteurs optiques du système de contrôle d’attitude.
5.2 – Les Expériences Scientifiques
Il est envisageable d’embarquer sur le voilier des expériences scientifiques. Ces expériences éventuelles doivent être définies au cours de la phase A.
D’autre part, après le survol de la Lune, il peut être envisagé d’explorer des zones jusqu’ici inconnues, telles que les points de Lagrange du système Terre-Lune.
5.3 – Les Expériences Technologiques
Il est envisageable d’embarquer sur le voilier des expériences technologiques. Ces expériences éventuelles doivent être définies au cours de la phase A.
D’autre part, la modélisation et l’étude des mouvements de la voile et de ses mâts peut apporter une contribution importante à la compréhension du comportement des grandes structures spatiales.
5.4 – L’Après-Survol
Des propositions peuvent être faites pour l’utilisation du voilier après le survol de la Lune.